one stick drive skid steer mission planner Suppose I only want to use one joystick for the rover’s skid steering (throttle left . grab hire, muck away, crushed concrete, operated plant hire and earthworks for the Ipswich and surrounding are. . Felixstowe and surrounding areas. One off jobs through to long term contracts. Commercial site skips. We are a fully .
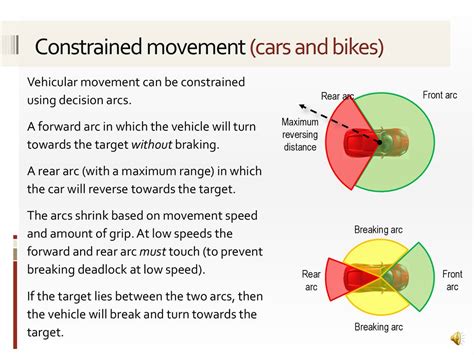
0 · Steering Input Type and Reversing Behaviour
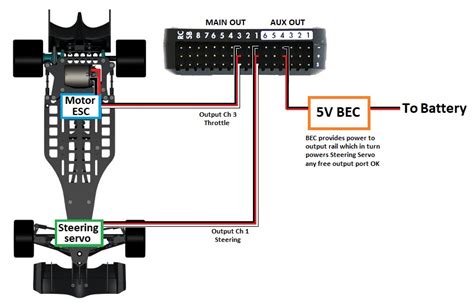
1 · Motor and Servo Connections — Rover
2 · Motor and Servo Configuration — Rover documentation
3 · How to Setup a Skid Steering on Mission Planner with Herelink
South Lakes Plant Hire provide self drive or operator hire of mini diggers, we operate in the South Lakes, Kendal, Grange, Windermere, Kirkby Lonsdale areas but can hire and deliver plant further afield.
Learn how to set up and test the steering and throttle methods, motor driver types, ESC .move the throttle stick on your transmitter to maximum. add power to the ESC. At this stage . Suppose I only want to use one joystick for the rover’s skid steering (throttle left .This Two Paddle Input method can be enabled by setting PILOT_STEER_TYPE to “1”. Once .
Steering Input Type and Reversing Behaviour
Motor and Servo Connections — Rover
Learn how to wire and configure your rover's motor and servo connections depending on the steering and throttle method. Find the parameters values for .Learn how to set up and test the steering and throttle methods, motor driver types, ESC configuration, and minimum throttle for rover vehicles. Use the Mission Planner to check the motor direction, dead zone, and speed scaling. Suppose I only want to use one joystick for the rover’s skid steering (throttle left and throttle right). How can I configure this one? These are the parameters that I have set in Mission Planner.
This Two Paddle Input method can be enabled by setting PILOT_STEER_TYPE to “1”. Once enabled, raising RC input 1 channel high is like controlling the left motor of a skid-steer vehicle so the vehicle will turn right.
Learn how to wire and configure your rover's motor and servo connections depending on the steering and throttle method. Find the parameters values for separate steering, skid steering, omni vehicles and wheel encoders. I can now see the servo outputs on mission planner behaving as I think they should ie both servo1 and servo3 move together when I move the transmitter throttle stick up and down. And servo1 and servo3 move in opposite directions when I . If your rover has separate motors for left and right, then the differential speed is, by definition, how it will be driven. This is called skid-steering. You tell Ardurover that this is the type of physical setup you have by setting the RC channel functions for your left and right servos to ThrottleLeft (73) and ThrottleRight(74).
what is the width of a kubota track skid steer
Motor and Servo Configuration — Rover documentation
what is the best skid steer turf tire
-200lb custom built steel frame rover. It resembles a very small UPS truck. -Casters up front, 2 independent 750w rear motors. -2x60 Sabertooth controller. -Pixhawk. -Futaba RxTx system. -915mz telemetry. -5.8ghz video transmission. As for what we have tried: -Setup as a rover in Mission Planner. It should be possible to test that the motors work using the Mission Planner’s motor test screen. “Test Motor C” should make the left motor turn forward, “Test Motor D” should make the right motor turn forward. The problem is with the ArduPilot Rover Boat model which only provides an either/or choice of differential skid steering, or fairly conventional speed on 1 channel, direction on 2nd channel control models.Mission Planning. This section contains articles about creating missions that will run when the vehicle switched to AUTO mode. Note. The instructions focus on the Mission Planner but the main concepts apply to other Ground Control Stations as well. Recording Waypoints for a Mission. Planning a Mission with Waypoints and Events. Mission Command List
Learn how to set up and test the steering and throttle methods, motor driver types, ESC configuration, and minimum throttle for rover vehicles. Use the Mission Planner to check the motor direction, dead zone, and speed scaling.
Suppose I only want to use one joystick for the rover’s skid steering (throttle left and throttle right). How can I configure this one? These are the parameters that I have set in Mission Planner.This Two Paddle Input method can be enabled by setting PILOT_STEER_TYPE to “1”. Once enabled, raising RC input 1 channel high is like controlling the left motor of a skid-steer vehicle so the vehicle will turn right.Learn how to wire and configure your rover's motor and servo connections depending on the steering and throttle method. Find the parameters values for separate steering, skid steering, omni vehicles and wheel encoders.
I can now see the servo outputs on mission planner behaving as I think they should ie both servo1 and servo3 move together when I move the transmitter throttle stick up and down. And servo1 and servo3 move in opposite directions when I . If your rover has separate motors for left and right, then the differential speed is, by definition, how it will be driven. This is called skid-steering. You tell Ardurover that this is the type of physical setup you have by setting the RC channel functions for your left and right servos to ThrottleLeft (73) and ThrottleRight(74). -200lb custom built steel frame rover. It resembles a very small UPS truck. -Casters up front, 2 independent 750w rear motors. -2x60 Sabertooth controller. -Pixhawk. -Futaba RxTx system. -915mz telemetry. -5.8ghz video transmission. As for what we have tried: -Setup as a rover in Mission Planner.
How to Setup a Skid Steering on Mission Planner with Herelink
It should be possible to test that the motors work using the Mission Planner’s motor test screen. “Test Motor C” should make the left motor turn forward, “Test Motor D” should make the right motor turn forward.
The problem is with the ArduPilot Rover Boat model which only provides an either/or choice of differential skid steering, or fairly conventional speed on 1 channel, direction on 2nd channel control models.
what is average usage for a skid steer
Looking for Mini Digger Hire in Huntly? Discover rental services for construction projects. Tell us more and let businesses contact you. It’s free! Yell.com Yell Business. Download the app Get .
one stick drive skid steer mission planner|Steering Input Type and Reversing Behaviour